Robotics - What is Robotics?
Roboticists develop man-made mechanical devices that can move by
themselves, whose motion must be modelled, planned, sensed, actuated
and controlled, and whose motion behaviour can be influenced by
“programming”. Robots are called “intelligent” if they succeed in
moving in safe interaction with an unstructured environment, while
autonomously achieving their specified tasks.
This definition implies that a device can only be called a “robot” if
it contains a movable mechanism, influenced by sensing, planning,
actuation and control components. It does not imply that a minimum
number of these components must be implemented in software, or be
changeable by the “consumer” who uses the device; for example, the
motion behaviour can have been hard-wired into the device by the
manufacturer.
So, the presented definition, as well as the rest of the material in
this part of the WEBook, covers not just “pure” robotics or only
“intelligent” robots, but rather the somewhat broader domain of
robotics and automation. This includes “dumb” robots such as: metal
and woodworking machines, “intelligent” washing machines, dish washers
and pool cleaning robots, etc. These examples all have sensing,
planning and control, but often not in individually separated
components. For example, the sensing and planning behaviour of the
pool cleaning robot have been integrated into the mechanical design of
the device, by the intelligence of the human developer.
Robotics is, to a very large extent, all about system integration,
achieving a task by an actuated mechanical device, via an
“intelligent” integration of components, many of which it shares with
other domains, such as systems and control, computer science,
character animation, machine design, computer vision, artificial
intelligence, cognitive science, biomechanics, etc. In addition, the
boundaries of robotics cannot be clearly defined, since also its
“core” ideas, concepts and algorithms are being applied in an ever
increasing number of “external” applications, and, vice versa, core
technology from other domains (vision, biology, cognitive science or
biomechanics, for example) are becoming crucial components in more and
more modern robotic systems.
This part of the WEBook makes an effort to define what exactly is that
above-mentioned core material of the robotics domain, and to describe
it in a consistent and motivated structure. Nevertheless, this chosen
structure is only one of the many possible “views” that one can want
to have on the robotics domain.
In the same vein, the above-mentioned “definition” of robotics is not
meant to be definitive or final, and it is only used as a rough
framework to structure the various chapters of the WEBook. (A later
phase in the WEBook development will allow different “semantic views”
on the WEBook material.)
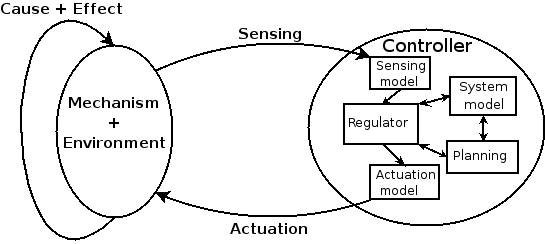
Components of robotic systems
This figure depicts the components that are part of all robotic
systems. The purpose of this Section is to describe the semantics of
the terminology used to classify the chapters in the WEBook:
“sensing”, “planning”, “modelling”, “control”, etc.
The real robot is some mechanical device (“mechanism”) that moves
around in the environment, and, in doing so, physically interacts with
this environment. This interaction involves the exchange of physical
energy, in some form or another. Both the robot mechanism and the
environment can be the “cause” of the physical interaction through
“Actuation”, or experience the “effect” of the interaction, which can
be measured through “Sensing”.
Robotics as an integrated system of control interacting with the
physical world.
Sensing and actuation are the physical ports through which the
“Controller” of the robot determines the interaction of its mechanical
body with the physical world. As mentioned already before, the
controller can, in one extreme, consist of software only, but in the
other extreme everything can also be implemented in hardware.
Within the Controller component, several sub-activities are often
identified:
Modelling. The input-output relationships of all control components
can (but need not) be derived from information that is stored in a
model. This model can have many forms: analytical formulas, empirical
look-up tables, fuzzy rules, neural networks, etc.
The name “model” often gives rise to heated discussions among
different research “schools”, and the WEBook is not interested in
taking a stance in this debate: within the WEBook, “model” is to be
understood with its minimal semantics: “any information that is used
to determine or influence the input-output relationships of components
in the Controller.”
The other components discussed below can all have models inside. A
“System model” can be used to tie multiple components together, but it
is clear that not all robots use a System model. The “Sensing model”
and “Actuation model” contain the information with which to transform
raw physical data into task-dependent information for the controller,
and vice versa.
Planning. This is the activity that predicts the outcome of potential
actions, and selects the “best” one. Almost by definition, planning
can only be done on the basis of some sort of model.
Regulation. This component processes the outputs of the sensing and
planning components, to generate an actuation setpoint. Again, this
regulation activity could or could not rely on some sort of (system)
model.
The term “control” is often used instead of “regulation”, but it is
impossible to clearly identify the domains that use one term or the
other. The meaning used in the WEBook will be clear from the context.
Scales in robotic systems
The above-mentioned “components” description of a robotic system is to
be complemented by a “scale” description, i.e., the following system
scales have a large influence on the specific content of the planning,
sensing, modelling and control components at one particular scale, and
hence also on the corresponding sections of the WEBook.
Mechanical scale. The physical volume of the robot determines to a
large extent the limites of what can be done with it. Roughly
speaking, a large-scale robot (such as an autonomous container crane
or a space shuttle) has different capabilities and control problems
than a macro robot (such as an industrial robot arm), a desktop robot
(such as those “sumo” robots popular with hobbyists), or milli micro
or nano robots.
Spatial scale. There are large differences between robots that act in 1D, 2D, 3D, or 6D (three positions and three orientations).
Spatial scale. There are large differences between robots that act in 1D, 2D, 3D, or 6D (three positions and three orientations).
Time scale. There are large differences between robots that must react
within hours, seconds, milliseconds, or microseconds.
Power density scale. A robot must be actuated in order to move, but
actuators need space as well as energy, so the ratio between both
determines some capabilities of the robot.
System complexity scale. The complexity of a robot system increases
with the number of interactions between independent sub-systems, and
the control components must adapt to this complexity.
Computational complexity scale. Robot controllers are inevitably
running on real-world computing hardware, so they are constrained by
the available number of computations, the available communication
bandwidth, and the available memory storage.
Obviously, these scale parameters never apply completely independently
to the same system. For example, a system that must react at
microseconds time scale can not be of macro mechanical scale or
involve a high number of communication interactions with subsystems.
Background sensitivity
Finally, no description of even scientific material is ever fully
objective or context-free, in the sense that it is very difficult for
contributors to the WEBook to “forget” their background when writing
their contribution. In this respect, robotics has, roughly speaking,
two faces: (i) the mathematical and engineering face, which is quite
“standardized” in the sense that a large consensus exists about the
tools and theories to use (“systems theory”), and (ii) the AI face,
which is rather poorly standardized, not because of a lack of interest
or research efforts, but because of the inherent complexity of
“intelligent behaviour.” The terminology and systems-thinking of both
backgrounds are significantly different, hence the WEBook will
accomodate sections on the same material but written from various
perspectives. This is not a “bug”, but a “feature”: having the
different views in the context of the same WEBook can only lead to a
better mutual understanding and respect.
Research in engineering robotics follows the bottom-up approach:
existing and working systems are extended and made more versatile.
Research in artificial intelligence robotics is top-down: assuming
that a set of low-level primitives is available, how could one apply
them in order to increase the “intelligence” of a system. The border
between both approaches shifts continuously, as more and more
“intelligence” is cast into algorithmic, system-theoretic form. For
example, the response of a robot to sensor input was considered
“intelligent behaviour” in the late seventies and even early eighties.
Hence, it belonged to A.I. Later it was shown that many sensor-based
tasks such as surface following or visual tracking could be formulated
as control problems with algorithmic solutions. From then on, they did
not belong to A.I. any more.........
No comments:
Post a Comment